
STM32学习笔记
1. STM32简介
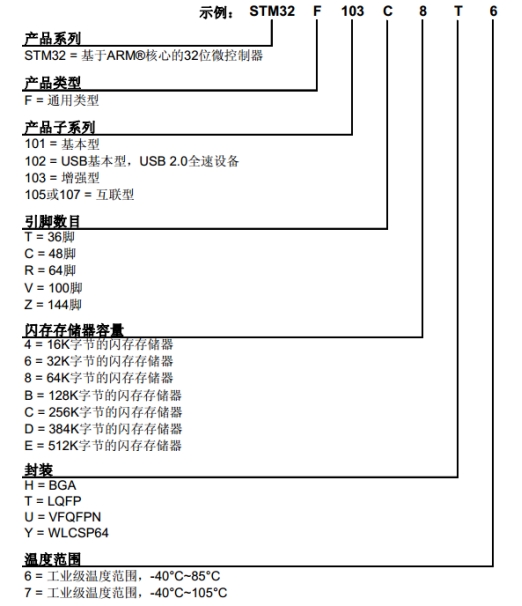
1.1 STM32命名规范
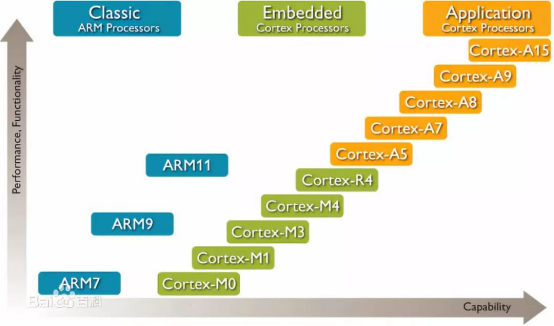
ARM既指ARM公司,也指ARM处理器内核。
A:Application,主要偏向于应用
R:Realtime,偏向于实时性
M:Microcontroller,微控制器
1.2STM32F103C8T6特性
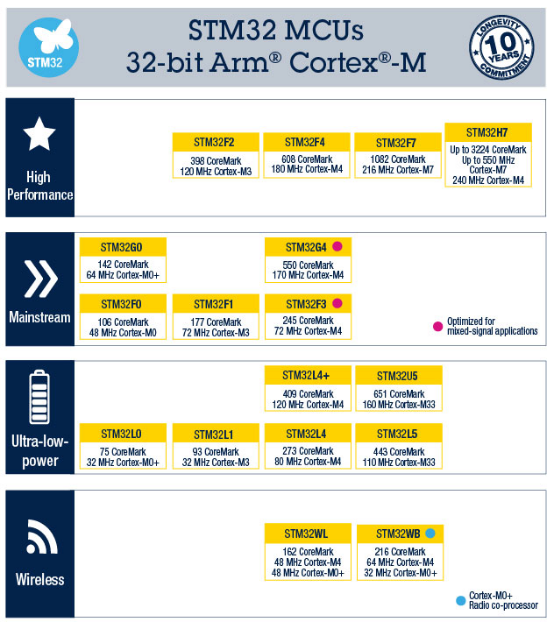
系列:主流系列STM32F1
内核:ARM Cortex-M3
主频:72MHz
RAM:20K(SRAM)
ROM:64K(Flash)
供电:2.0~3.6V(标准3.3V)
封装:LQFP48
1.3 片上资源外设

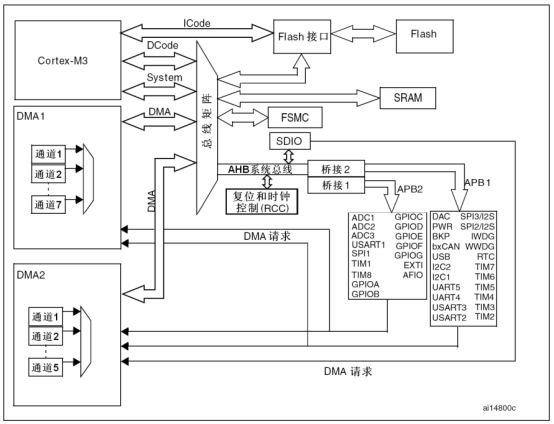
1.4 系统架构
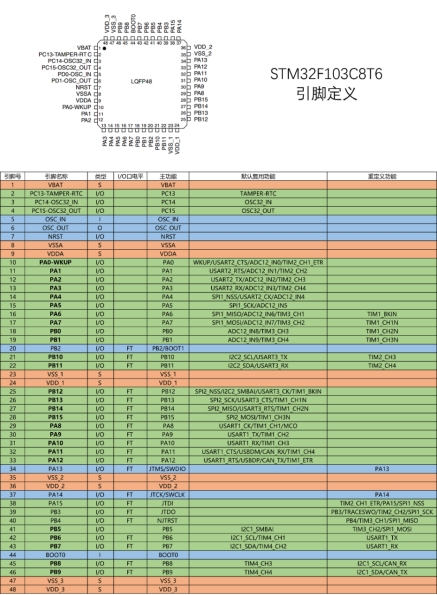
1.5 引脚定义
1.6 启动配置
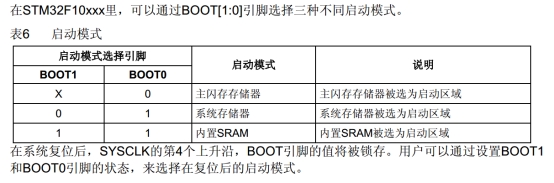
(1)最常用配置:BOOT0设为0,正常的执行Flash闪存里面的程序,使用STLINK、DAPlink进行下载调试
(2)串口下载模式:BOOT0设为1,BOOT1设为0,系统存储器(存放Bootloader程序,接收串口的数据,然后刷新到主闪存中)
(3)最后一种模式,主要用于程序调试,用的比较少
1.7 DAPLink烧录
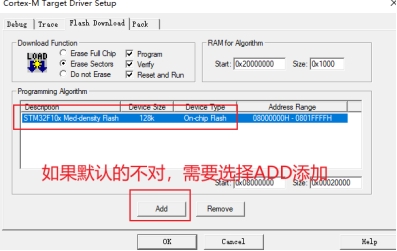
每次下载程序,需要先rebuild编译,在下载!
2、STM32工程模版
2.1 Keil配置工作模板
使用ST库函数的开发方式进行寄存器配置。
新建工程步骤:
建立工程文件夹,Keil中新建工程,选择型号
工程文件夹里建立Start、Library、User等文件夹,复制固件库里面的文件到工程文件夹
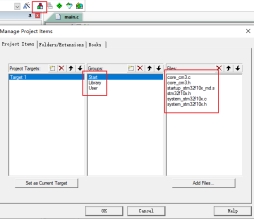
工程里对应建立Start、Library、User等同名称的分组,然后将文件夹内的文件添加到工程分组里
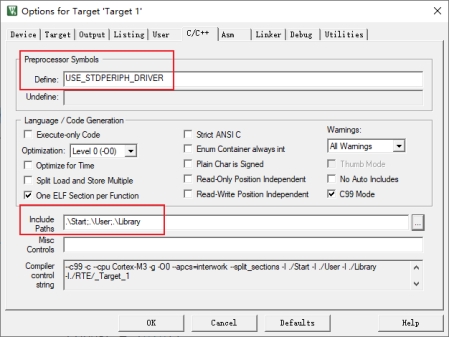
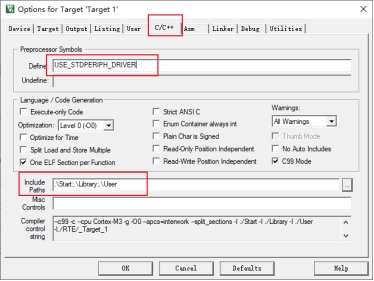
工程选项,C/C++,Include Paths内声明所有包含头文件的文件夹
工程选项,C/C++,Define内定义USE_STDPERIPH_DRIVER (标准外设驱动字符串,使用库函数开发时,这个是必须添加的)
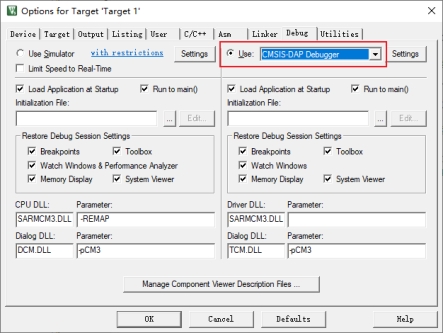
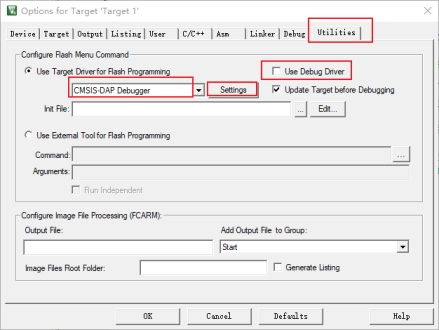
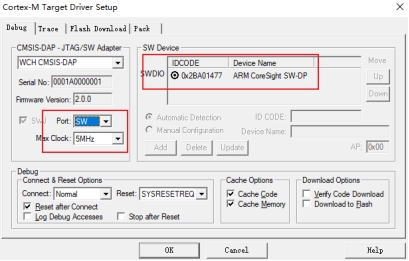
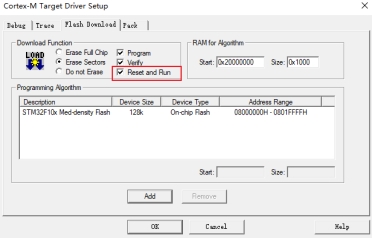
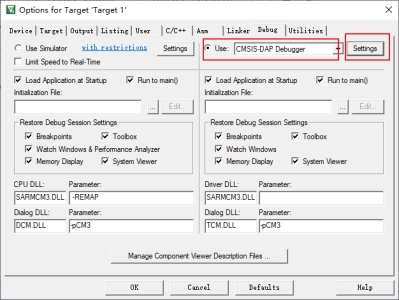
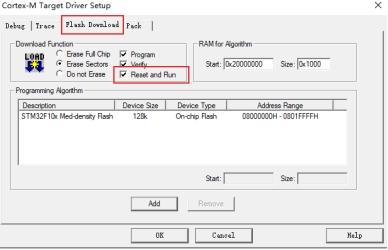
工程选项,Debug,下拉列表选择对应调试器,Settings,Flash Download里勾选Reset and Run
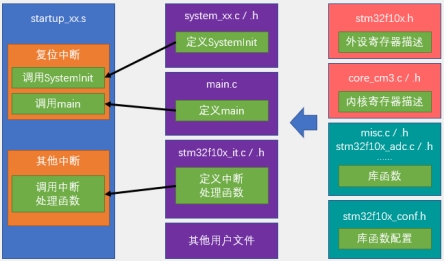
工程架构:
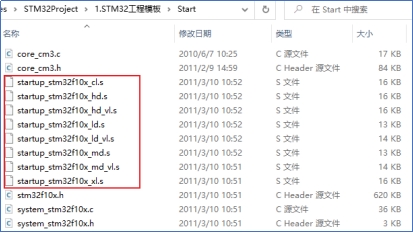
根据不同的产品型号,选择不同的文件:

2.2、创建工程步骤总结
- 快速创建Start、Library、User组,添加相关的文件
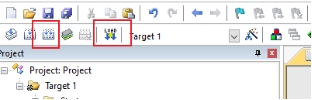
2.点击魔术棒按钮,添加第一步文件的路径,并添加这句话USE_STDPERIPH_DRIVER
- 选择对应的调试器(DAPLink)
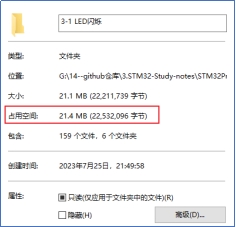
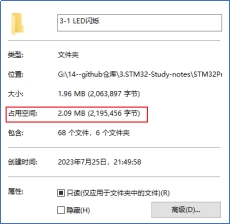
4.小工具:keilkill,是一个批处理文件,可以把工程编译产生的中间文件都删掉

使用前后的对比:减小工程体积,之后可以添加到压缩包分享发送给别人
3. GPIO配置及应用
3.1 GPIO工作模式介绍
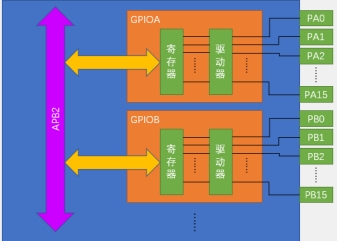
GPIO基本结构:
GPIO位结构:
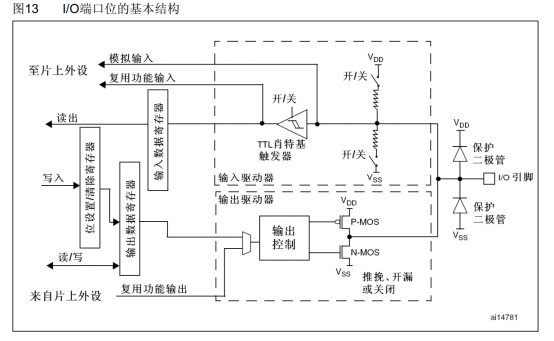

单片机的GPIO配置为输出模式时,会有两种模式:推挽模式、开漏模式。
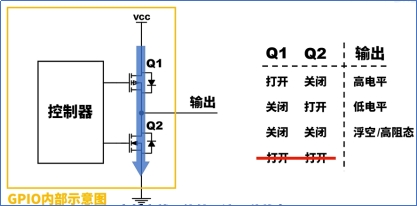
上下MOS同时导通时,发生短路,这种状态需要避免。
推挽输出模式理解:GPIO输出高低电平时,电流的一个动作而已
推:IO输出高电平时,把电流推出去
挽:IO输出低电平时,外界电流流进来,把电流挽回来。
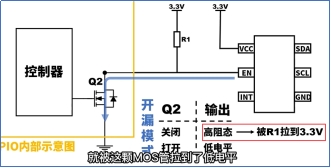
开漏模式:低电平和高阻态(被外接上拉电阻拉到高电平)的组合,称为开漏输出。
需要在外面接一个上拉电阻,常用于几个GPIO控制一个输入。
开漏模式输出高电平相当于高阻态,没有驱动能力;低电平有驱动能力。
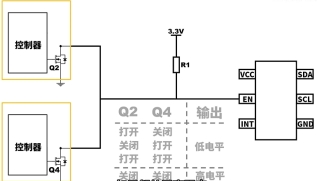
只要有任意一个GPIO输出低电平,enable就是低电平
如果都处于高阻态,enable就是高电平
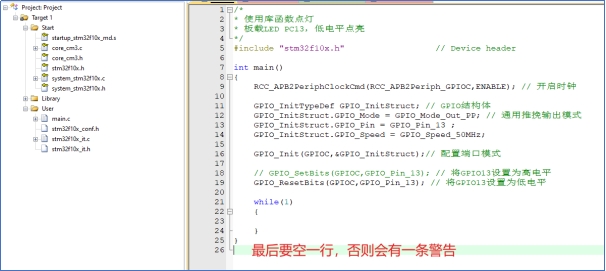
3.2 LED闪烁
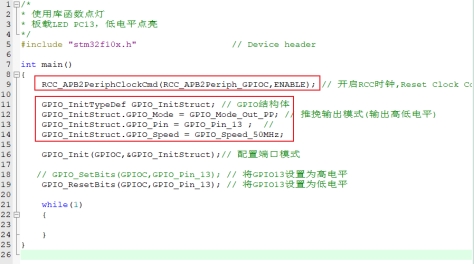
操作STM32的GPIO共需要3个步骤:
1.使用RCC开启GPIO的时钟
2.使用GPIO_Init函数初始化GPIO
3.使用输出或者输入的函数控制GPIO口
1.RCC(Reset Clock Controller),复位与时钟控制器,常用RCC AHB外设时钟控制、RCC APB2外设时钟控制、RCC APB1外设时钟控制

2.GPIO常用库函数
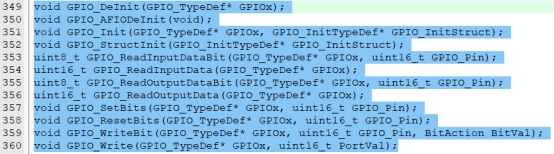
GPIO_Init()函数:用结构体的参数来初始化GPIO口,需要先定义一个结构体变量,然后给结构体赋值,最后调用这个函数。
GPIO工作模式:
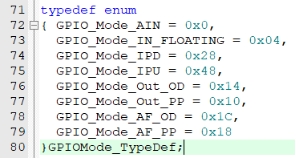
1 | typedef enum |
1 | void GPIO_SetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin); |
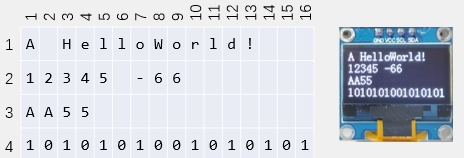
4. OLED显示屏使用
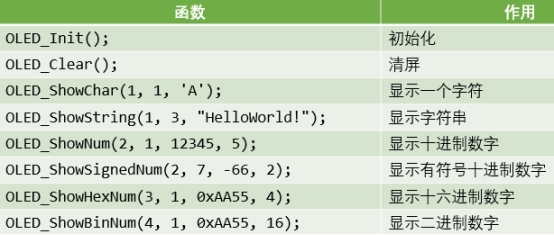
参数1:指定起始行;
参数2:指定起始列
0.96寸OLED,分辨率:12864,把分辨率设置为4行16列,字符大小88
STM32的引脚上电后,如果不初始化,默认为浮空输入的模式。
SCL —PB8
SDA —PB9
5. EXIT外部中断
使用中断系统可以加大的提高程序的运行效率,如果没有中断系统,为了防止外部中断被忽略或者串口数据被覆盖,主程序就只能不断地查询是否有这些事件发生。
比如如果没有定时器中断,主程序只能使用delay函数,才能实现定时的功能。
有了中断系统后,主程序就可以放心执行其他事情,有中断的时候再去处理。
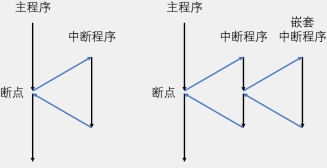
抢占优先级高的可以中断嵌套,响应优先级高的可以优先排队。
抢占优先级和响应优先级均相同的按\中断号**排队。
中断触发方式:上升沿/下降沿/双边沿(上升沿和下降沿都可以触发)/软件触发(如何进行软件触发设计?程序里执行一句代码,就可以触发中断)
触发响应方式:中断响应/事件响应
通道数:16个GPIO_PIN、外加PVD输出、RTC闹钟、USB唤醒、以太网唤醒
中断响应:引脚电平变化触发中断
事件响应:不会触发中断,而是触发别的外设操作,属于外设之间的联合工作,比如触发ADC转换、DMA
注意:
进入中断函数的时候要检查中断标志位,退出的时候清零中断标志位。
中断函数一般执行简短快速的代码,如操作中断标志位。
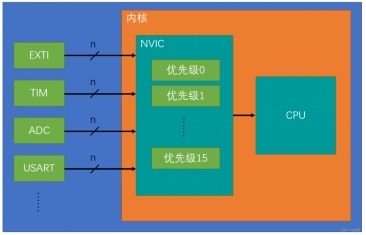
NVIC用于统一管理中断和分配中断优先级,属于内核外设,是CPU的小助手,可以让CPU专注于运算。相当于医院里的叫号系统(给病人进行排号,CPU相当于医生,只负责看病)。
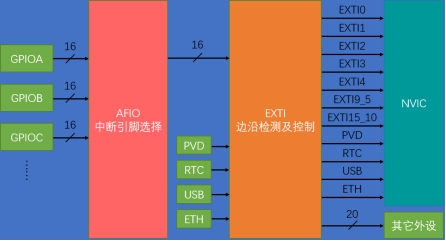
5.1 NVIC优先级分组
优先级:抢占优先级、响应优先级。
NVIC的中断优先级由优先级寄存器的4位(0~15)决定,这4位可以进行切分,分为高n位的抢占优先级和低4-n位的响应优先级(插队)
抢占优先级高的可以中断嵌套,响应优先级高的可以优先排队,抢占优先级和响应优先级均相同的按中断号排队

如果中断不多,很难导致中断冲突时,可以随意选择优先级分组,那个都行。
5.2 EXIT(Extern Interrupt)外部中断
EXIT的基本功能:检测引脚的电平变化,申请中断。
支持的GPIO口:所有的GPIO口,但相同的Pin不能同时触发中断。
比如PA0和PB0不能同时用,端口GPIO_Pin*只能选择一个作为中断引脚。
PA0和PA1可以同时触发中断。
通道数:16个GPIO_pin(也就是只能有16个引脚可以触发中断),外加PVD输出(电源电压监测)、RTC闹钟、USB唤醒、以太网唤醒。
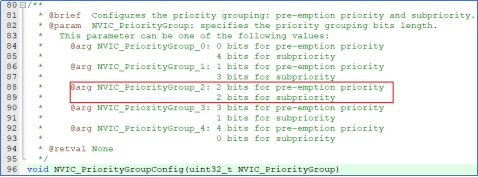
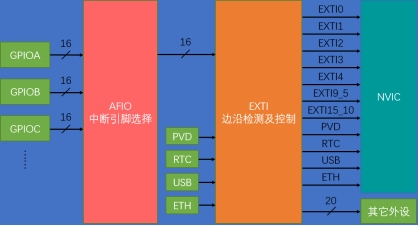
EXIT基本结构:
AFIO中断引脚选择:在GPIO(A~G)外设的16个GPIO_Pin中选择一个连接到后面的EXIT的通道里。
5.3 常用的触发外部中断的硬件模块
对于STM32来说,想要获取的信号是外部驱动的很快的突发信号,但是又不需要一直进行检测。
不需要经常使用、不需要一直检测的模块:
按键(注意抖动问题),不推荐,可以使用定时器中断
旋转编码器
红外遥控接收器
5.4 外部中断程序设计步骤
涉及到的外设:RCC、GPIO、AFIO、EXTI、NVIC
打开RCC时钟,不打开时钟,外设是无法进行工作的
配置GPIO,选择需要的端口,设为输入模式(推荐浮空、上拉、下拉)
配置AFIO,选择用的这一路GPIO,连接到后面的EXTI
配置EXTI,选择外部中断触发方式,选择触发响应方式(一般选择中断响应)
配置NVIC,给中断选择一个合适的优先级
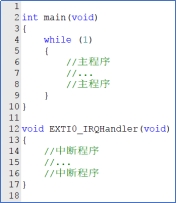
配置完之后,写中断执行函数:
在STM32中,中断函数的名字都是固定的,每个中断通道都对应一个中断函数。
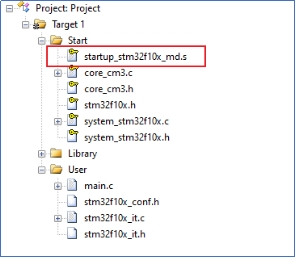
中断函数的名字可以参考启动文件中的“stratup_stm32f10x_md文件
配置AFIO相关函数

void GPIO_PinRemapConfig(uint32_t GPIO_Remap, FunctionalState NewState);
参数1:选择重映射方式
参数2:新的状态
void GPIO_EXTILineConfig(uint8_t GPIO_PortSource, uint8_t GPIO_PinSource);
配置AFIO的数据选择器,来选择想要的中断引脚
注意:主函数和中断函数不要操控同一个硬件(比如OLED显示),避免不必要的冲突,中断函数只执行突发的事件,需要快速的执行,如操作变量、中断标志位。
6.定时器中断
6.1 TIM简介
定时器:可以对输入的时钟进行计数,并在计数值达到设定值时触发中断
STM32在72MHz计数时钟下可以实现最大59.65s的定时。
16位计数器:执行计数定时的一个寄存器,每来一个时钟,计数器加1
预分频器:可以对计数器的时钟进行分频,让这个计数更加灵活
自动重装寄存器:计数的目标值(计多少个时钟申请中断),这些寄存器构成了最核心的部分。
这三部分组成了定时器的时基单元(计数器、自动重装寄存器、预分频器)
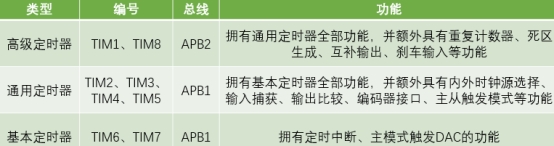
STM32F103C8T6定时器资源:TIM1、TIM2、TIM3、TIM4
6.2 基本定时器
可以完成定时中断,主模式触发DAC的功能。
DAC功能:数模转换
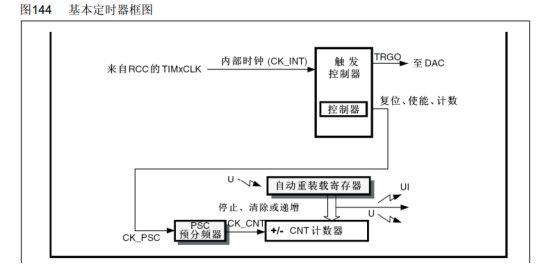
内部时钟(CK_CNT):一般就是系统的主频72MHz,通向时基单元的输入。
时基单元:16位预分频器 + 16位计数器 + 16位自动重装载寄存器。
预分频器:对输入的72MHz时钟进行预分频,寄存器内存储的值是实际的分频系数减一。写0就是不分频,写1就是2分频,写2就是3分频……
计数器:对预分频后的计数时钟进行计数,每遇到上升沿就加一。
自动重装载寄存器:存储计数的最大值,到达此值后触发中断并清零计数器。
折线UI:向上的折线箭头表示该位置会产生中断信号——“更新中断”(由计数值等于自动重装值产生的中断),这个中断信号会通向NVIC
折线U:向下的折线箭头表示该位置会产生事件——“更新事件”,这个更新事件不会触发中断,但可以触发内部其他电路的工作。比如将更新事件映射到触发输出TRGO,然后TRGO直接接到DAC的触发转换引脚上。
主模式触发DAC数模转换功能:
stm32的一大特色就是主从触发模式,可以让内部的硬件在不受程序的控制下自动运行,可以极大地减轻CPU的负担。
驱动DAC正常思路及其问题:每隔一段时间就产生一个定时中断,手动更新DAC的值。但这样子会频繁的产生中断,会影响主程序的运行和其他中断的响应。
解决方法:定时器设计了一个主模式,使用主模式可以将定时器的“更新事件”映射到“触发输出TRGO”,然后TRGO直接接到DAC的触发转换引脚上,于是定时器的更新就不需要中断来实现了。整个过程无需软件参与,实现了硬件的自动化。
6.3 通用定时器
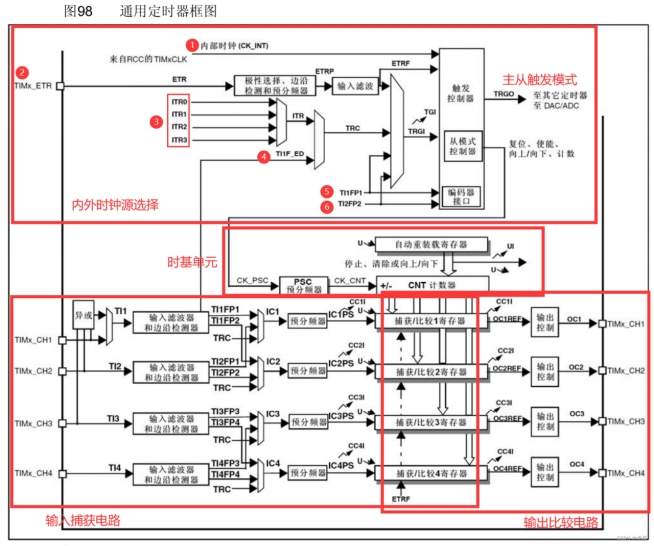
时基单元:PSC预分频器、CNT计数器、自动重装寄存器。通用定时器和高级定时器新增两个功能:向下计数模式、中央对齐计数模式。
向上计数模式(常用):从0开始累加,到自动重装值触发中断。
向下计数模式:从自动重装值递减,到0触发中断
中央对齐计数模式:从0开始累加,到自动重装载值触发中断,然后递减,到0再次触发中断。常用于电机控制的SVPWM算法中。
内外时钟源选择和主从触发模式结构:上面的一大块。下面介绍各种各样的内外时钟源:
定时器中断基本结构:
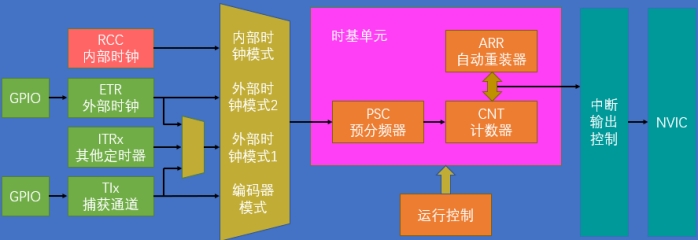
时基单元:中间的粉色部分。
运行控制:控制寄存器的一些位,如启动停止、向上或向下计数等,操作这些寄存器就可以控制时基单元的运行了。
内部时钟模式、外部时钟模式2、外部时钟模式1:外部时钟源选择。这个选择器的输出就是为时基单元提供时钟。
编码器模式:编码器独有的模式,一般用不到。
中断申请控制:由于定时器内部有很多地方要申请中断,“中断申请控制”就用来使能控制这些中断是否使能。比如,中断信号会先在状态寄存器里置一个中断标志位,这个标志位会通过中断输出控制,到NVIC申请中断。
6.4 定时器初始化步骤
开启RCC内部时钟
选择时基单元的时钟源,对于定时中断,选择内部时钟源
配置时基单元(预分频器、自动重装寄存器、计数模式)
配置输出中断控制,允许更新中断输出到NVIC
配置NVIC,在NVIC中打开定时器中断的通道,并分配一个优先级
运行控制
6.5 TIM输出比较原理
OC(Output Compare)输出比较
输出比较可以通过比较CNT与CCR寄存器值的关系,来对输出电平进行置1、置0或翻转的操作,用于输出一定频率和占空比的PWM波形
每个高级定时器和通用定时器都拥有4个输出比较通道
高级定时器的前3个通道额外拥有死区生成和互补输出的功能
CCR:Capture Compare,捕获比较寄存器。
PWM(Pulse Width Modulation)脉冲宽度调制
频率 = 1 / TS,一般在 几kHz~几十kHz。
占空比 = TON / TS
分辨率 = 占空比变化步距,也就是占空比变化的精细程度。一般1%足够使用。
注:定时中断的频率就是PWM波的频率,只不过占空比的变化范围由自动重装载值决定。
6.6 通用定时器输出比较通道
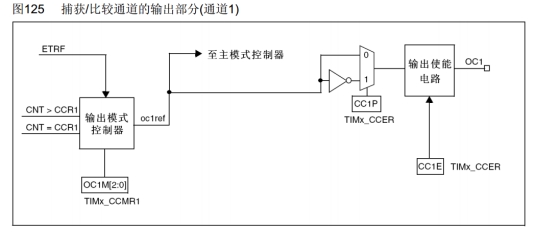
REF:reference,参考信号
输出比较模式:

置有效电平:置高电平
置无效电平:置低电平
PWM模式1:常用向上计数的方式
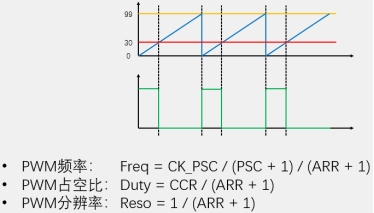
6.7 PWM输出的基本结构
在时基单元部分,输出PWM不需要中断。
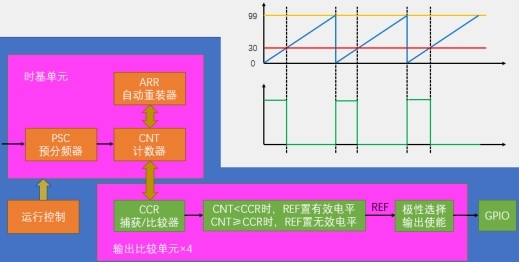
黄色线:ARR的值
蓝色线:CNT的值
红色线:CCR
绿色线:输出PWM
CNT < CCR:输出高电平
CNT ≥ CCR:输出低电平
CCR设置的高一些,输出的占空比就变大;CCR设置的低一些,输出的占空比就变小。
参数计算:
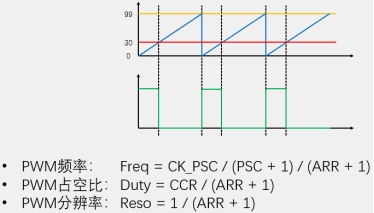
分辨率:占空比变化的步距离。
PWM频率:一秒钟PWM有多少个周期。
问题:如何输出一个占空比频率为1Khz,占空比可任意调节,且分辨率为1%的PWM波形,相关参数应如何进行设置。
ARR = 99
PSC = 719
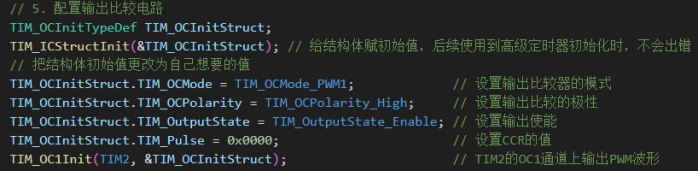
设计PWM输出的基本步骤:
开启RCC时钟,把需要的TIM外设和GPIO外设的时钟打开
配置时基单元,包括前面的时钟源选择
配置输出比较单元:CCR的值,输出比较模式、极性选择、输出使能这些参数
配置GPIO,把PWM对应的GPIO口,初始化为复用推挽输出的配置。
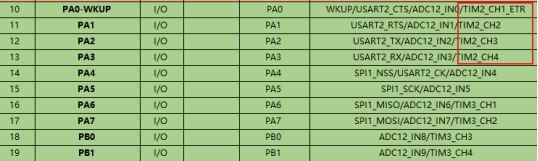
如果要使用TIM2的OC1也就是CH1通道输出PWM,只能使用PA0输出PWM
TIM2的OC2只能使用PA1输出PWM
TIM2的OC3使用PA2
TIM2的OC4使用PA3
引脚重定义(重映射):当一个引脚有多个功能时,如果可以进行重定义功能,则可以通过重映射的功能把原来的引脚映射到新的引脚上。这样就可以避免两个外设引脚的冲突。
如果想要定时器来控制输出引脚,需要使用复用推挽输出的模式
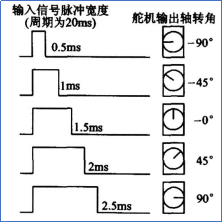
6.8 PWM驱动舵机
舵机是一种根据输入PWM信号占空比来控制输出角度的装置,根据输入PWM信号的要求,周期为20ms,高电平宽度为0.5ms~2.5ms。
PWM参数计算:
PWM频率:50hz
ARR = 20k - 1
PSC = 72 -1
注:20K对应20ms,那么CCR设置为500,就是0.5ms,参数很直观
注意PWM的VCC接到5V。
7. ADC数模转换器
STM32的ADC是12位的,AD结果最大值是4095,也就是2^12-1 = 4095,对应的电压为3.3V
STM32F103C8T6的ADC资源:ADC1、ADC2,10个外部输入通道。
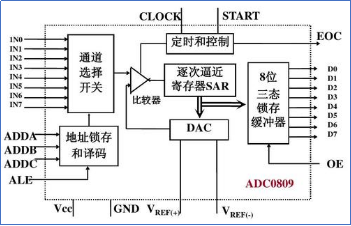
12位逐次逼近型ADC,最大1us转换时间(1MHz)
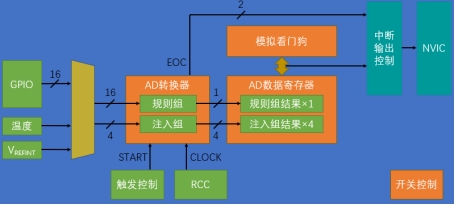
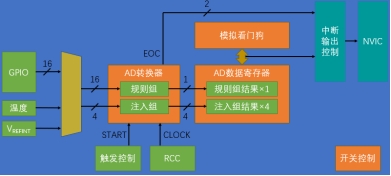
18个输入通道,可测量16个外部和2个内部信号源
规则组和注入组两个转换单元
模拟看门狗自动监测输入电压范围
逐次逼近型ADC:
ADC基本结构:
双ADC模式:ADC1和ADC2一起工作,它俩可以配合组成同步模式、交叉模式等。
转换模式:
l 单次转换,非扫描模式
l 单次转换,扫描模式
l 连续转换,非扫描模式
l 连续转换,扫描模式
数据对齐:
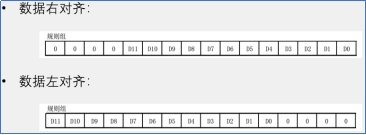
STM32的ADC是12位的,它的转换结果就是一个12位的数据。但是这个数据寄存器是16位的,所以就存在一个数据对齐的问题。
一般使用右对齐,这样读取这个16位寄存器,直接就是转换结果。
转换时间:
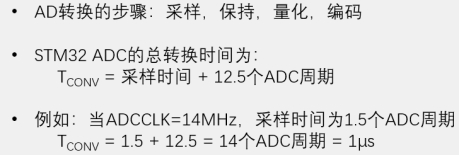
采样时间越大,越能避免一些毛刺信号的干扰。不过转换时间也会延长。
校准:
l ADC有一个内置自校准模式。校准可大幅减小因内部电容器组的变化而造成的准精度误差。校准期间,在每个电容器上都会计算出一个误差修正码(数字值),这个码用于消除在随后的转换中每个电容器上产生的误差
l 建议在每次上电后执行一次校准
l 启动校准前, ADC必须处于关电状态超过至少两个ADC时钟周期
7.1 AD单通道
开启RCC时钟,包括ADC和GPIO的时钟
配置ADC的分频器
配置GPIO,把需要用的GPIO配置成模拟输入的模式
配置多路开关,把左边的通道接入到右边的规则组列表里
配置ADC转换器,在库函数里使用结构体进行配置
消除ADC返回结果的方法:
迟滞比较:设置两个阈值,低于下阈值开灯,高于上阈值时关灯。
滤波:平滑数据(均值滤波)
裁剪分辨率:直接把数据的尾数去掉,也可以减小数据的波动
7.2 AD多通道
扫描模式:如果想要使用扫描模式实现多通道,最好要配合DMA来实现。因为:
l 问题1:在扫描模式下,启动列表之后,每一个单独的通道转换完成之后,不会产生任何的标志位,也不会触发中断,不知道某一个通道是不是转换完了。
l 问题2:AD的速度非常快,转换一个通道大概只有几us,如果不能在几us的时间内把数据转运走,那数据就会丢失。
如果不使用扫描模式,可以使用单次转换、非扫描的方式来实现多通道。只需要在每次触发转换之前,手动更改一下列表第一个位置的通道就行了。
扫描模式+DMA转运数据:DMA是转运多通道数据的最优解。
8. DMA直接存取器存取
DMA(Direct Memory Access)直接存储器存取
DMA可以提供外设和存储器或者存储器和存储器之间的高速数据传输,无须CPU干预,节省了CPU的资源
12个独立可配置的通道: DMA1(7个通道), DMA2(5个通道)
每个通道都支持软件触发和特定的硬件触发
STM32F103C8T6 DMA资源:DMA1(7个通道)
DMA基本结构:
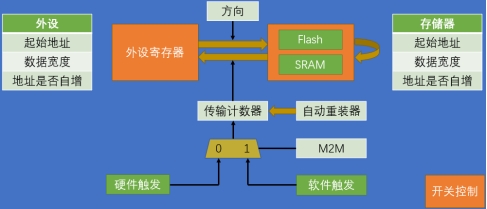
DMA最常见的用途:配合ADC的扫描模式。
